介绍
在前面我们提到了牛顿法求解非线性方程,但是牛顿法有一个明显的缺点,就是在每一步迭代中都要计算函数值和一阶导数,这个计算量是巨大而且困难的,因此我们希望减少这个计算,对牛顿法进行了改进–简化牛顿法。
分析
简化牛顿法是牛顿法的变种,原因在于,牛顿法中每一步都需要计算$f(x_k)$和$f^{‘}(x_k)$,这是需要很大计算量的。除此之外,牛顿法中的初始近似$x_0$只在精确解$x^*$附近才能保证收敛。简化牛顿法就是为了解决这个问题的。首先给出简化牛顿法的迭代公式:
$$
x_{k+1} = x_k - Cf(x_k),
$$
则迭代函数为:$\phi(x) = x - Cf(x)$.
若$|\phi^{‘}(x)| = |1-Cf^{‘}(x)| < 1$,即取$0 < Cf^{‘}(x) < 2$在根附近成立,则该迭代法局部收敛。
同时取$C = \frac{1}{f^{‘}(x_0)}$,这样就只需要在第一步计算$f^{‘}(x_0)$,大大减少了计算量。其几何意义是用斜率为$f^{‘}(x_0)$的平行弦与$x$轴交点作为$x^*$的近似解。
代码实现
Matlab代码:
1 | % 简化牛顿法 |
其中myFun是需要求解的非线性方程。
小结
对上面编写的代码进行了简单的数值实验,结果如下:
迭代步数与误差的关系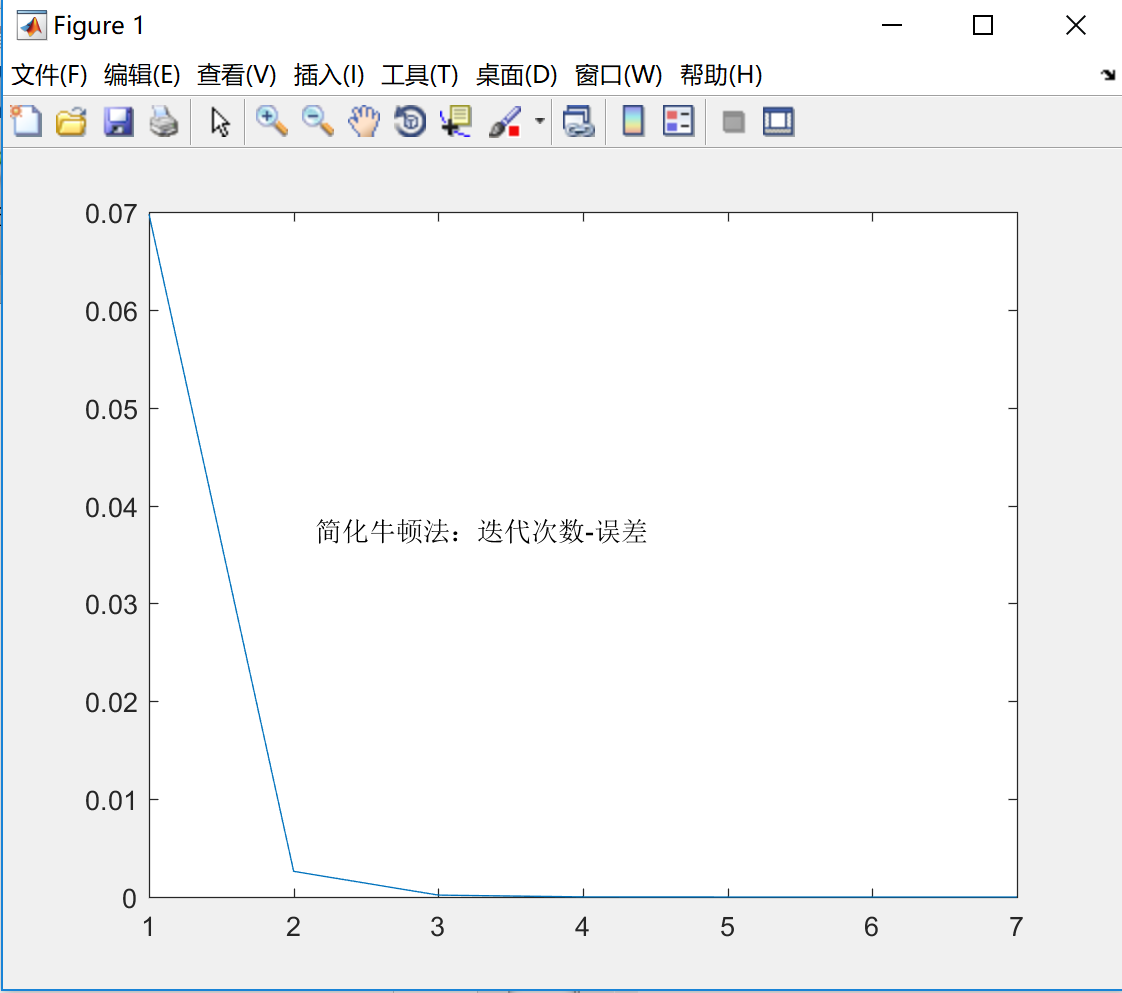
计算时间与误差的关系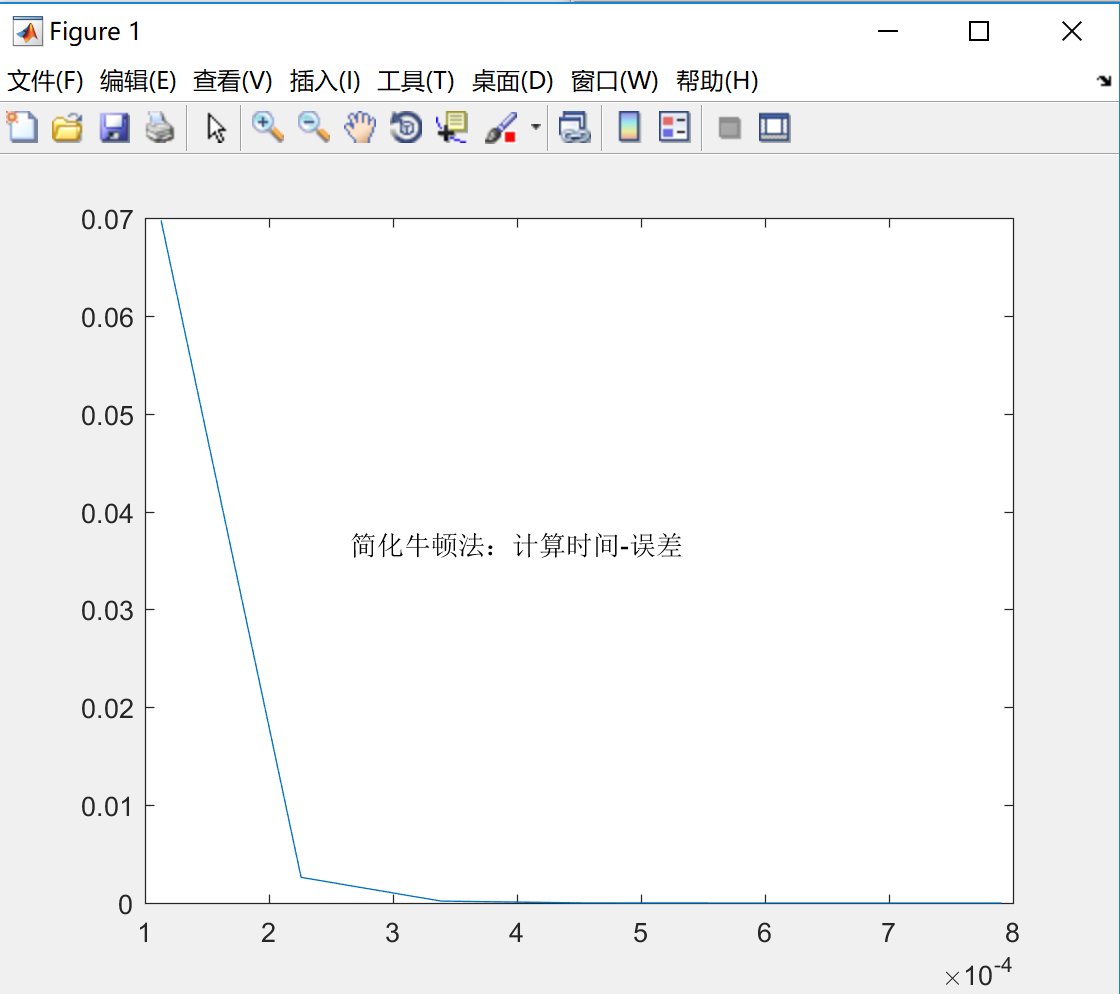
分析:从结果分析,简化牛顿法的迭代次数要比牛顿法多,这说明简化牛顿法的收敛速度是不如牛顿法的。它的特点是减少了运算量,但是收敛速度是线性的。
简化牛顿法比牛顿法更有应用价值,对简化牛顿法的分析和讲解就到这里了,谢谢!
参考资料:
1.数值分析(第5版) 李庆扬,王能超,易大义 编

